Всё для CAN и CANopen
Промышленные преобразователи, анализаторы, встраиваемые сетевые модули, чипы, исходный код и другое для сетей CAN и CANopen.
Выберите подкатегорию
Преобразователи (сетевые шлюзы) с поддержкой интерфейса CAN, обеспечивающие конвертирование CAN протоколов в стандартные промышленные и беспроводные интерфейсы (Modbus-TCP, Modbus-RTU, Fiber Optic, Wi-Fi и т.д.).
Работа с деревом выбора оборудования: выберите интересующую Вас задачу и кликните по блоку. После этого будет выполнен переход на станицу с кратким описанием подходящего для решения этой задачи оборудованием.
Оптические преобразователи аналого-цифровых сигналов (4. 20 мА. 0-10 В, DH+ и т.д.) в оптические и обратно
Обеспечение взаимодействия таких интерфейсов как Profibus DP, CAN, Profinet, Modbus, DeviceNet, ASCII и т.д.
Оптические преобразователи и повторители для передачи данных IE и Fieldbus (Ethernet/IP, BACnet, Modbus-TCP Profibus, CANopen, Genius, LonWorks и т.д..) на большие расстояния
Подбор оборудования путем выбора нужных типов сетей
Выберите типы сетей или протоколы устройств взаимодействие между которыми Вам необходимо реализовать. Если Вы не обладаете данной информацией, то всегда можно воспользоваться умным поиском или одним из нескольких других инструментов поиска на сайте, в том числе и связаться с нами! Если Вы не нашли нужный тип интерфейса/протокола в первой колонке (слева), то попробуйте поискать во второй (справа)
Устройства для работы с протоколом CAN. Конвертеры CAN. Шлюзы CAN.
Данный раздел включает следующее оборудование для работы с протоколом CAN:
Конвертеры протокола CAN / шлюзы CAN / адаптеры CAN / Репиторы CAN
Скачать прайс-лист на оборудование CAN
Описание протокола CAN:
CAN (англ. Controller Area Network — сеть контроллеров) — стандарт промышленной сети, ориентированный прежде всего на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи — последовательный, широковещательный, пакетный.
СКАЧАТЬ: Описание шины CAN от BOSСH (eng) PDF
CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время широко распространён в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности и многих других областях.
С начала 2000-х годов — стандарт для автомобильной автоматики.
CAN — последовательная магистраль, обеспечивающая увязку в сеть «интеллектуальных» устройств ввода/вывода, датчиков и исполнительных устройств некоторого механизма или даже предприятия. Характеризуется протоколом, обеспечивающим возможность нахождения на магистрали нескольких ведущих устройств, обеспечивающим передачу данных в реальном масштабе времени и коррекцию ошибок, высокой помехоустойчивостью. Система CAN обеспечена большим количеством микросхем, обеспечивающих работу подключенных к магистрали устройств, разработку которых начинала фирма BOSH для использования в автомобилях, и в настоящее время широко используемых в автоматизации промышленности.
Непосредственно стандарт CAN от Bosch определяет передачу в отрыве от физического уровня — он может быть каким угодно, например, радиоканалом или оптоволокном. Но на практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары, определённым в стандарте ISO 11898. Передача ведётся кадрами, которые принимаются всеми узлами сети.
Предназначен для организации высоконадежных недорогих каналов связи в распределенных системах управления. Интерфейс широко применяется в промышленности, энергетике и на транспорте. Позволяет строить как дешевые мультиплексные каналы, так и высокоскоростные сети.
Скорость передачи задается программно и может быть до 1 Мбит/с. Пользователь выбирает скорость, исходя из расстояний, числа абонентов и емкости линий передачи.
Расстояние, м 25 | 50 | 100 | 250 | 500 | 1000 | 2500 | 5000
Скорость, Кбит/с 1000 | 800 | 500 | 250 | 125 | 50 | 20 | 10
Протокол CAN использует оригинальную систему адресации сообщений. Каждое сообщение снабжается идентификатором, который определяет назначение передаваемых данных, но не адрес приемника. Любой приемник может реагировать как на один идентификатор, так и на несколько. На один идентификатор могут реагировать несколько приемников.
Протокол CAN обладает развитой системой обнаружения и сигнализации ошибок. Для этих целей используется поразрядный контроль, прямое заполнение битового потока, проверка пакета сообщения CRC-полиномом, контроль формы пакета сообщений, подтверждение правильного приема пакета данных. Хемминговый интервал d=6. Общая вероятность необнаруженной ошибки 4.7×10-11.
Система арбитража протокола CAN исключает потерю информации и времени при «столкновениях» на шине.
Интерфейс с применением протокола CAN легко адаптируется к физической среде передачи информации. Это может быть дифференциальный сигнал, оптоволокно, просто открытый коллектор и т.п. Несложно делается гальваническая развязка.
Элементная база, поддерживающая CAN, широко выпускается в индустриальном исполнении.
Синхронная шина, с типом доступа Collision Resolution (CR), который в отличие от Collision Detect (CD) сетей (Ethernet — это CD) детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления (fieldbus). Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
CAN. Промышленная сеть CAN
CAN (Controll Area Network) — открытый протокол последовательной связи, который определен на физическом и канальном уровнях, получил развитие на пользовательском у ровне и утвержден в качестве стандарта ISO 11898.
Рис. 11.4. Структур стандартного фрейма данных
На рис.11.4 приняты следующие обозначения:
SOF — старт фрейма: один доминирующий бит.
Поле арбитража – в структуре расширенного фрейма количество бит идентификактора увеличено до 29 и добавлены два служебных бита. RTR – бит, которым сообщение определяется как фрейм данных или как удаленный фрейм.
Поле Управляющее — содержит 6 бит, из которых 4 бита DLC определяют количество байт данных в поле данных, а биты- IDE и R(0) зарезервированы для развития.
Поле данных — содержит до 8-ми байт данных.
CRC – 15 бит контрольной суммы, обеспечивающие высокий уровень достоверности передачи сообщений.
Поле АСК — поле подтверждения правильного приема сообщения.
EOF– поле конца фрейма. В нем передаются 7 рецессивных бит.
Int и BI — соответственно обязательный интервал между фреймами и уровень свободной шины.
По окончанию фрейма на шине в течение интервала времени Int, который не может быть меньше 3-х бит, удерживается сигнал высокого уровня для отделения переданного фрейма от следующего. Если после завершения передачи фрейма шина остается свободной, то на ней удерживается сигнал BI высокого уровня.
2)Структура и назначение служебных фреймов: Удаленный фрейм предназначен для выполнения запроса удаленной передачи от одного узла на передачу данных другим узлам сети. Его структурное отличие от фрейма данных состоит в отсутствии поля данных. Фрейм ошибок и фрейм перегрузки содержат по два поля: в первом располагаются флажки ошибок и служебная информация, а во втором передаются восемь рецессивных битов разграничения.
3) Организация достоверной передачи сообщений в сети CAN
Контроль достоверности приема сообщения осуществляется в поле подтверждения АСК (acknowlegment – подтверждение), которое содержит два участка: ACK-Slot и ACK –Delimiter (рис.11.5.):
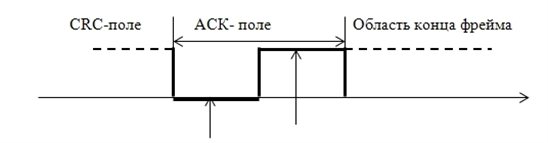
Сегмент подтверждения ACK- Slot Сегмент разграничителя ACK- Delimiter
Рис. 11.5. Структура поля АСК
Принцип подтверждения состоит в том, что передающий узел посылает в обоих сегментах АСК рецессивные биты и одновременно отслеживает состояние сигнала на шине. Приемник анализирует СКС принимаемого фрейма: если будет установлено, что сообщение недостоверно, то состояние приемник не изменяет уровень сигнала в АСК-Slot, но если будет установлен достоверный прием сообщения, то приемник в секторе АСК-Slot выставляет доминирующий бит. При наложении рецессивного бита передатчика и доминирующего бита приемника в линии установится доминирующий бит, подтверждающий передающему узлу, что сообщение принято и повтор не требуется. Таким образом, если низкий уровень сигнала принять за логическую «1», а высокий – за логический «0», то в поле АСК будут передаваться сигналы: 10 – если подтверждение получено или 11 если подтверждение не получено.
Протокольно в CAN реализуются следующие механизмы обнаружения ошибок, которые возникают при передаче сообщения:
— Разрядная ошибка появляется, когда передатчик сравнивает уровень на шине с уровнем, который должен передаваться, и обнаруживает их неравенство.
— Ошибка подтверждения возникает, когда передатчик определяет, что сообщение не было подтверждено.
— Ошибка заполнения появляется, когда узел обнаруживает шесть (6) последовательных битов одного и того же значения. В процессе нормальной работы, когда передатчик обнаруживает, что послано пять (5) последовательных битов одного и того же значения, то он заполняет следующий бит противоположным значением (это называется заполнением бита). Все приемники удаляют заполненные биты до вычисления CRC (контрольного кода). Таким образом, когда узел обнаруживает шесть (6) последовательных битов того же значения, возникает ошибка заполнения.
— CRC ошибка выявляется, когда вычисленное приемником значение CRC принятого сообщения не соответствует значению CRC, указанному в сообщении.
Когда активный узел обнаруживает одну из указанных выше ошибок в передаче сообщения, то он передает активный фрейм ошибки, который состоит из шести (6) последовательных доминирующих битов. Такая передача отменит любую другую передачу, проходящую в то же самое время, и заставит все другие узлы обнаружить ошибку наполнения, которая, в свою очередь, заставляет их отбрасывать текущий фрейм.
4) Принцип организации взаимодействия устройств в сети CAN существенно отличается от других тем, что в ней используется децентрализованный принцип передачи сообщений, в котором для исключения состязаний за право передачи сообщения каждому сообщению присваивается определенный приоритет: он определяется значением идентификатора в поле арбитража. На основе идентификатора реализован механизм арбитража при выявлении конфликтов доступа к шине.
Управление доступом к CAN- шине состоит в том, что сообщение, передаваемое одним из CAN-устройств (узлом сети), рассылается сразу всем другим CAN-устройствам подключенным к линии связи (узлам сети). По этой причине все узлы CAN-сети непрерывно контролируют состояние уровня сигнала в шине.
Любое CAN-устройство может начать передачу фрейма только тог-да, когда линия связи не занята передачей сигнала. Если CAN-устройство начало передачу сообщения, то оно будет владеть шиной до завершения этой передачи. Если два или больше CAN-устройств одновременно попытаются начать передачу сообщения, то возникает конфликт, решение которого осуществляется арбитражным путем с использованием 11-битного идентификатора стандартного фрейма или 29-битного идентификатора расширенного фрейма: право на передачу фрейма получит тот узел, который передает сообщение с более высоким приоритетом.
Механизм арбитража состоит в следующем. В течение передачи поля арбитража биты идентификатора последовательно передаются в линию связи, начиная от старшего значещего к младшему. В процессе выполне-ния передачи CAN-устройство одновременно и формирует в линию связи сигнал требуемого уровня (CAN_L/CAN_H), и контролирует состояние си-гнала в линии связи, сравнивая: соответствует текущее значение сигнала в линии связи сформированному значению?
Если CAN-устройство сформировало в линию связи сигнал высокого уровня CAN_H и в линии связи установился сигнал CAN_H, то устройство продолжает передачу фрейма. Если CAN-устройство сформировало в линию связи сигнал высокого уровня CAN_H, а в линии связи будет установлен сигнал низкого уровня CAN_L, устройство должно прекратить передачу в линию связи своего сигнала. При одновременном формировании в линию связи сигналов с высоким и с низким уровнями сигнал низкого уровня «давит» сигнал высокого уровня. По этой причине арбитраж выигрывает то CAN-устройство, у которого идентификатор имеет самое низкое значение!
Источник https://www.industrialnets.ru/can-and-canopen_devices/
Источник http://www.asu-info.ru/index.php/can
Источник https://eti.su/articles/promishlennaya-avtomatika/promishlennaya-avtomatika_611.html